Back to projects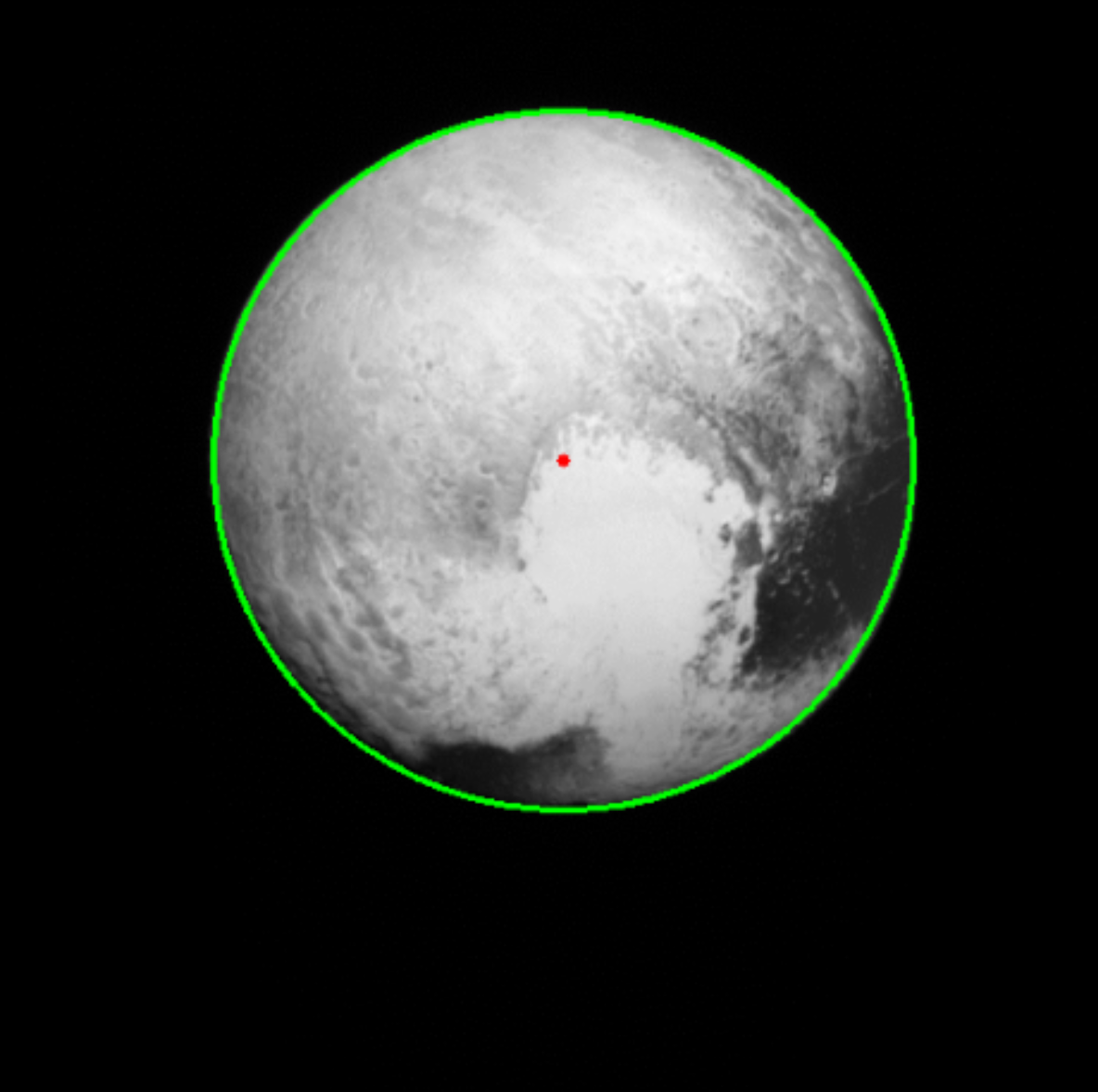
Horizon-Based OpNav with LORRI Imagery
This project implemented horizon-based optical navigation (OpNav) using real flight imagery from the New Horizons spacecraft during its flyby of Pluto.
Key Achievements:
• Estimated the intrinsic calibration matrix for the LORRI camera using focal length and pixel pitch to compute focal length in pixels
• Developed a Python pipeline using OpenCV to preprocess the image, detect Pluto's limb, and fit a circular model to the planet's horizon
• Applied similar-triangle geometry to back-calculate the Z-distance from the pixel radius of Pluto's limb and computed x, y offsets to localize the camera-frame position
Skills: Python, Optimization (linear and nonlinear)
Project Documentation
Horizon-Based OpNav Report
Comprehensive documentation of the optical navigation implementation, including camera calibration, limb detection algorithms, and spacecraft position estimation using New Horizons LORRI imagery.