Back to projects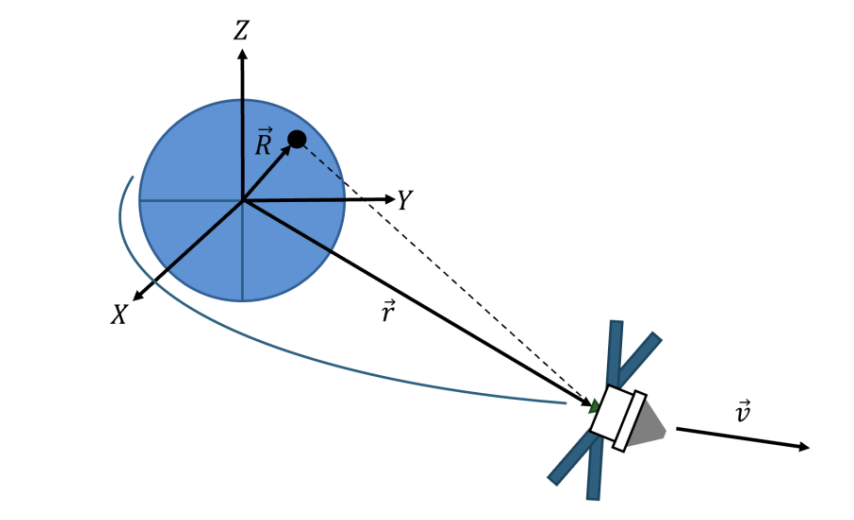
EKF-Based Trans-Lunar Coast Tracking
This project involved building an Extended Kalman Filter (EKF) to track a spacecraft's trajectory during its trans-lunar coast using measurements from NASA's Goldstone Deep Space Network.
Key Achievements:
• Designed and implemented a discrete-time EKF using a nonlinear two-body dynamics model with Gaussian white noise acceleration
• Derived and implemented Jacobians for dynamic propagation and R3B measurement models to form EKF's sensitivity matrix
• Created a full simulation pipeline in Python using real tracking data to estimate 6D spacecraft state and generate diagnostic plots
Skills: Python, Extended Kalman Filter
Project Documentation
EKF Trans-Lunar Tracking Report
Comprehensive documentation of the Extended Kalman Filter implementation, including coordinate transformations, Jacobian derivations, and spacecraft state estimation results.